
Unlocking Dexterity: How New Robotic Hands Learn from Human Movements
A groundbreaking study from a team at the University of California San Diego and Amazon Frontier AI & Robotics demonstrates a revolutionary approach to creating robotic hands that closely mimic human dexterity. Instead of manually programming complex control systems for each specific task, the researchers leverage a data-driven framework that learns from over 4 million frames of human hand motions drawn from everyday activities.
What is the Research About?
This research tackles a significant challenge in robotics: designing robotic hands that are both functional and adaptable. Traditional methods often require extensive programming for each task, making the process cumbersome. However, by observing and mimicking human hand movements, this study proposes an innovative way to generate robotic hands that can reproduce a diverse range of motions with just a few simple control policies.
Key Innovations
The framework introduced in this study optimizes both the design of the robotic hands and the control policies simultaneously, which is a marked departure from traditional methods. By focusing on human fingertip motions—like those used in daily tasks—the researchers were able to create hands that not only move accurately but can also adapt to various manipulation tasks.
One of the standout features of this research is the ability to produce two types of robotic hands: 1. A 6-degree-of-freedom (DoF) general-purpose hand capable of broad teleoperation.2. Lower-DoF specialized hands designed for specific tasks, which are simpler and more efficient.
How Does It Work?
The process begins with capturing extensive human motion data, which is then processed through a machine learning model. The researchers developed a reinforcement-learning actor system that predicts and proposes effective designs for the robotic hands. This method drastically reduces the time needed for design iterations—from hours down to merely a few minutes.
Once the designs are established, the robotic hands can be fabricated as one-piece structures with articulated joints, ready for real-world applications. The results show that these hands can maintain a remarkable accuracy, achieving fingertip tracking that surpasses current commercial options.
Real-World Applications and Future Prospects
The implications of this research extend far beyond the laboratory. Future applications could range from advanced prosthetics that adapt to the wearer's needs to versatile robotic systems capable of working in unpredictable environments, from manufacturing to healthcare settings.
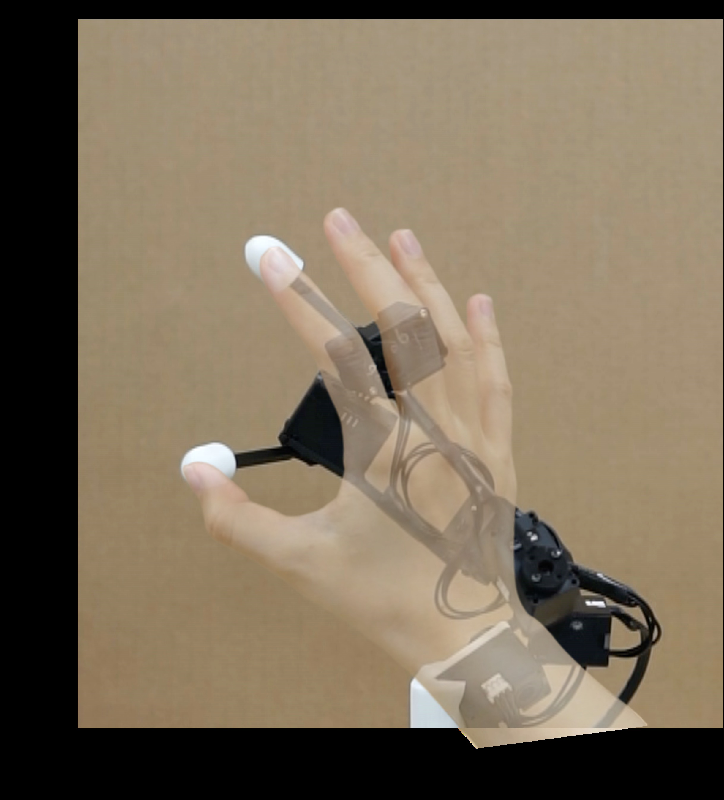
Despite the significant strides made in this study, the researchers acknowledge some limitations, such as the focus on only thumb-index movements and the constraints of the design space which may not cover all aspects of human hand manipulation. They recommend further research to incorporate full-hand dynamics and enhance the robustness and manufacturability of the robotic hands.
As this technology continues to evolve, it promises to unlock new levels of dexterity and functionality in robotic systems, making them more efficient and versatile than ever before.





