
Revolutionizing Space Autonomy: How AutoResearch Utilizes AI to Drive Aerospace Control Innovation
As the demand for autonomous spacecraft grows, so too does the complexity of their operations. A groundbreaking research paper titled Agentic AutoResearch for Space Autonomy by Amit Jain and Richard Linares from the Massachusetts Institute of Technology unveils an innovative framework called AutoResearch, leveraging large language models (LLMs) to autonomously tackle aerospace control problems.
A New Era in Aerospace Experimentation
Developing control policies for spacecraft traditionally requires heavy human labor, often involving trial and error to decipher whether improvements are substantial or simply due to randomness. AutoResearch aims to streamline this iterative process by introducing a layer of credibility to the research loop. This allows results to be certified against the inherent variability of experimental conditions, ensuring that advancements are both genuine and reproducible.
How AutoResearch Works
The AutoResearch framework operates by setting up a series of steps that an LLM follows to conduct experiments. Initially, it reads a plain-language description of the problem and manipulates editable portions of a training script while continuously logging outcomes. The model suggests alterations for each subsequent iteration, which are then executed and analyzed. Notably, this research agent operates entirely offline and does not control the spacecraft directly, ensuring the integrity of the process.
The Significance of the Credibility Layer
One of the key innovations of AutoResearch is its embedded credibility layer. This component filters experimental results by measuring the "seed noise"—the inherent variability present due to experimental conditions. Only those improvements that exceed this noise threshold by a specified margin are accepted, thereby setting a rigorous standard for claims of advancement.
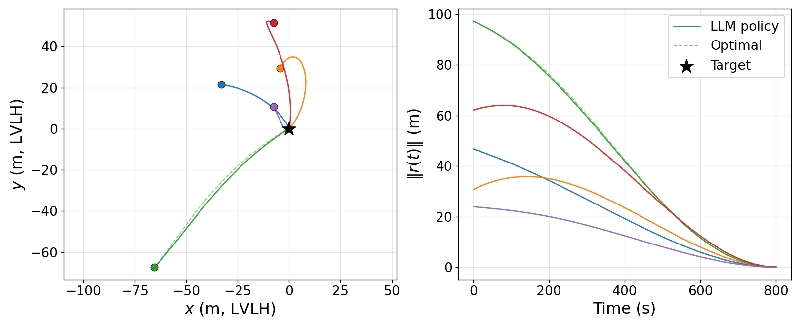
For instance, in testing with two aerospace control problems, it was found that the policies developed via AutoResearch not only outperformed indeterminate searches but did so with a clear statistical backing. For a relative rendezvous problem, the framework successfully certified results that surpassed the noise threshold by a significant margin, while simultaneously tackling safety constraints in collision-avoidance scenarios.
Promising Results and Future Directions
The initial results indicate that AutoResearch can effectively refine spacecraft control policies. In both studied problems, the autonomous agent demonstrated a capacity to achieve performance levels well beyond random searches. The implications for practical applications are profound, enhancing the safety and effectiveness of autonomous navigation systems.
Jain and Linares outline several future directions, including refining the framework's responsiveness based on different language-model backends and expanding its capabilities to cover more complex aerospace scenarios. As they pursue these enhancements, the team envisions a future where LLM-driven experimentation fosters a new generation of reliable and auditable autonomous systems for space exploration.
In conclusion, AutoResearch not only marks a significant leap forward in aerospace experimentation but also paves the way for deploying advanced autonomous capabilities in future space missions. The integration of statistical rigor within machine learning research holds the promise of transforming how we perceive and enhance spacecraft autonomy.
Authors: {Amit Jain, Richard Linares}





