
Revolutionizing Robot Sight: The GazeLNN Model That Mimics Human Attention with Unprecedented Efficiency
In an innovative stride for autonomous navigation, researchers from the Norwegian University of Science and Technology have unveiled a groundbreaking model called GazeLNN. This new technology harnesses human visual attention principles to enable robots to navigate their environments more effectively. Unlike conventional methods that demand massive computational power, GazeLNN operates with remarkable efficiency, making it a game-changer for the field.
Understanding GazeLNN: The Power of Human-Like Attention in Robotics
The traditional approach to robot vision has often relied on heavy-duty computational models, which can be prohibitive, particularly in resource-constrained environments. GazeLNN sets itself apart by leveraging Liquid Neural Networks (LNNs) as its core architecture, enabling the prediction of fixation scanpaths—essentially how human eyes move and focus—while significantly reducing computational costs.
By employing MobileNetV3 for feature extraction, GazeLNN has managed to maintain a low computational overhead of just 0.61 GFLOPs. This allows it to achieve an impressive speed of 6.84 milliseconds per frame, outperforming existing models by a staggering 99.40% in terms of computational efficiency.
How GazeLNN Enhances Robot Navigation
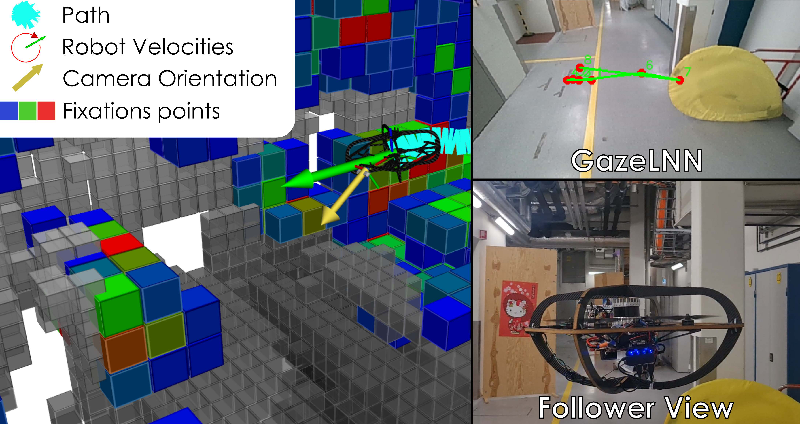
The practical applications of GazeLNN extend beyond theoretical predictions. Integrated into an active camera-robot control policy, the model enables robots to select and process images based on where their cameras should focus—essentially guiding them to "look" at what humans would naturally find most interesting or important.
In real-world tests using aerial robots, GazeLNN outperformed static camera systems by allowing robots to gather more comprehensive data about their surroundings. The new approach not only aids in obstacle avoidance but also enhances the quality of scene understanding by focusing on salient visual features. Compared to a static system, the GazeLNN-guided camera captured nearly eight times more relevant visual information.
The Future of Autonomous Navigation
The implications of GazeLNN's design and performance open up exciting possibilities for future developments in robotics. As the model continues to undergo refinement and testing, its integration of human-like attention behavior is paving the way for robots that adapt to their environments with a level of perception that closely resembles human cognition.
This pioneering research acts as a testament to the merging of human cognitive science with artificial intelligence, promising smarter and more responsive robotic systems in the near future.
In summary, GazeLNN is more than just an advanced model; it embodies a future where robots can perceive and interact with the world in ways previously thought impossible, revolutionizing fields ranging from search-and-rescue missions to autonomous deliveries.
Authors: Fatma Youssef Mohammed, Grzegorz Malczyk, Kostas Alexis





