
Introducing GazeLNN: The Lightweight Powerhouse Revolutionizing Robot Vision with Human-like Attention
In the rapidly advancing world of autonomous robotics, the need for efficient and effective visual processing is paramount. A groundbreaking research paper titled Fast Human Attention Prediction for Fixation-guided Active Perception in Autonomous Navigation by Fatma Youssef Mohammed, Grzegorz Malczyk, and Kostas Alexis introduces a novel approach to this challenge: GazeLNN, a state-of-the-art model designed to mimic human visual attention while significantly reducing computational costs.
The Vision Behind GazeLNN
Human beings have a remarkable ability to process their environments through structured eye movements, directing attention where it’s most needed. This research taps into that natural behavior, utilizing a model called GazeLNN powered by Liquid Neural Networks (LNNs) and MobileNetV3 for rapid visual feature extraction. Unlike conventional deep learning models that often demand extensive computational resources, GazeLNN operates with just 0.61 GFLOPs—making it extraordinarily efficient.
Why Traditional Models Fall Short
Current predictive models in robotics struggle with high computational overhead, primarily due to their reliance on complex architectures like Transformers. These systems, while powerful, can’t meet the real-time demands of robotic applications where light weight and quick processing are critical. The authors of this paper recognized this issue and developed GazeLNN to achieve a balance between performance and efficiency.
Breaking Down GazeLNN's Innovative Mechanics
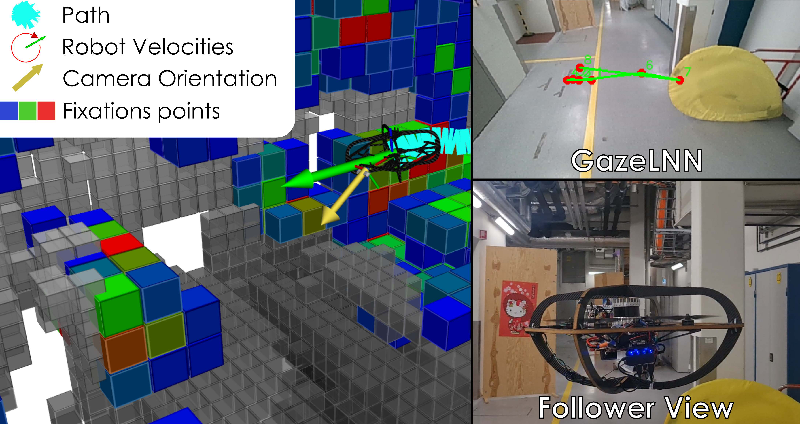
GazeLNN’s architecture is designed with flexibility in mind, predicting sequential fixation heatmaps that guide camera movements in robots. By mimicking the human gaze, which combines rapid movements and focused attention—termed “saccades” and “fixations”—GazeLNN enables robots to allocate their processing resources intelligently. This results in more informed navigation decisions and enhanced awareness of dynamic environments.
Real-World Applications and Achievements
The integration of GazeLNN into active camera-robot control systems showcases its practical utility. Through extensive experiments, the model demonstrated significant improvements in navigation tasks, amassing nearly 50% more spatial data points compared to traditional, rigid navigation methods. Using active perception, robots can navigate autonomously, directing their cameras to visually salient regions of their environment, thus creating richer and more informative maps.
Future Implications and Conclusion
As GazeLNN continues to push the boundaries of what’s possible in robotic vision, its lightweight, efficient design holds promise not only for enhanced robotic navigation but for a variety of applications from autonomous drones to assistive technologies in human environments. This innovative approach to attention-driven perception proves significant for future research and development in the field, opening doors for further advancements.
In conclusion, GazeLNN represents a landmark achievement in the intersection of human cognitive modeling and robotics, paving the way for smarter, more agile machines that can understand and interact with the world in ways that were previously the realm of science fiction.
Authors: Fatma Youssef Mohammed, Grzegorz Malczyk, Kostas Alexis





