
From Human Movements to Robotic Grasping: The Future of Shape-Shifting Robot Hands
A groundbreaking new study reveals how researchers have harnessed the power of human hand movements to create advanced robot hands capable of mimicking intricate finger motions. Led by a team from the University of California San Diego and Amazon Frontier AI & Robotics, this innovative approach focuses on generating robot hand designs through detailed analysis of real human gestures.
Bridging Human Skill with Robotic Precision
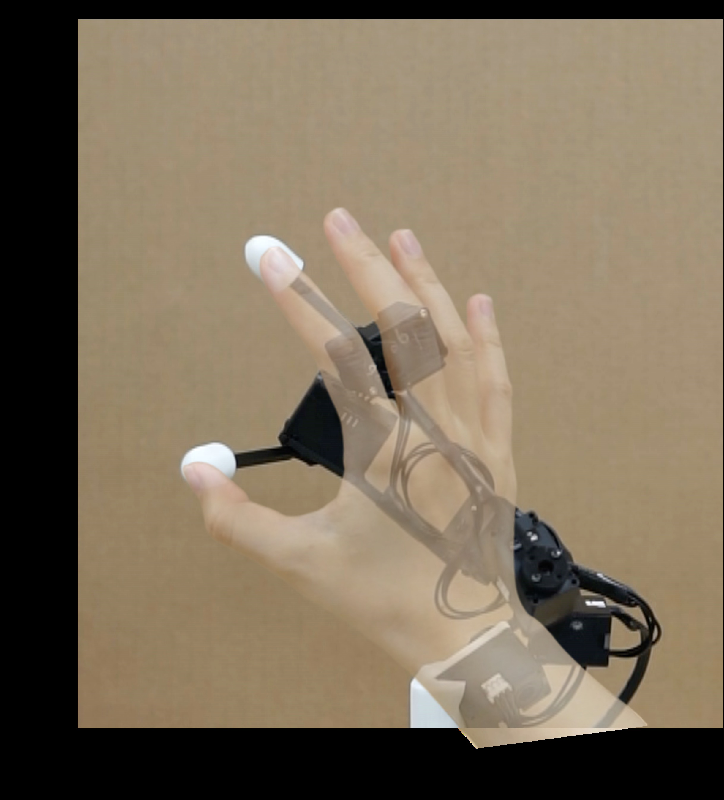
Robots equipped with dexterous hands are becoming increasingly important in various industries, including healthcare, manufacturing, and logistics. The research explores how data-driven techniques can enable robots to perform tasks that require precise manipulation, just like humans do. By capturing over 4 million frames of human fingertip motion from everyday tasks, the authors have engineered a framework that not only generates robot hands but also optimizes their design in line with how humans naturally move their fingers.
The Power of Co-Adaptation: Learning Design and Control Together
Traditionally, the challenge has been that the design of a robot and its control mechanisms are developed independently, leading to inefficiencies and limitations. This study introduces a co-adaptation approach where robot hardware parameters and joint angle control policies are optimized simultaneously during training. Notably, the authors showcase the remarkable versatility of this approach, as they were able to produce both generalist robot hands with six degrees of freedom (DoF) and task-specific hands with less complexity, catering to a range of applications.
Reducing Complexity through Reinforcement Learning
What sets this research apart is the innovative use of a reinforcement-learning actor that helps propose efficient hand designs. This creative strategy reduced the design search time from several hours to mere minutes, showcasing how machine learning can significantly expedite the optimization process. It highlights that, just like athletes train over time, robots can also learn to fine-tune their mechanics through continual adaptations based on the data gathered from human motion.
Results that Outshine Existing Technology
In rigorous testing, the resultant six-joint hand design not only outperformed existing commercial robot hands but also demonstrated highly accurate tracking of human fingertip movements. With a mean fingertip tracking error of a mere 0.24 millimeters, the newly developed hand showed that it could effectively replicate complex motions, opening the door for more intuitive human-robot interactions.
Future Implications: Beyond the Fingertips
While the current research targets thumb-index fingertip motions, the team envisions expanding this technology to full-hand interactions, which includes grasping objects with the palm, compliance, and effective force application. By integrating structural strength and a broader range of movements, future iterations of these robot hands could interact seamlessly with various objects in real-world settings.
This evolution in robotic technology is likely to pave the way for smarter, more adaptable machines that can assist in sensitive tasks, enhancing productivity and safety across numerous sectors.





