
Enhancing Continuum Robots: The Future of Resilient Motion Planning
In an era where robotic systems are becoming increasingly integral to various industries, achieving resilience and adaptability in robotics takes precedence. A recent research paper by Oxana Shamilyan and her team delves into enhancing the resilience of continuum robots through advanced motion planning algorithms that not only navigate but also self-adapt based on environmental changes.
The Challenge of Continuum Robots
Continuum robots stand apart from traditional robotic forms due to their flexible structure—they are designed to handle complex tasks in unpredictable environments. However, their flexibility poses a challenge in controlling their motions effectively. The ability to plan paths autonomously in dynamic and complicated settings remains a hurdle, leading to a reliance on human operators for guidance.
The Proposed Solution: Multi-Criteria Motion Planning
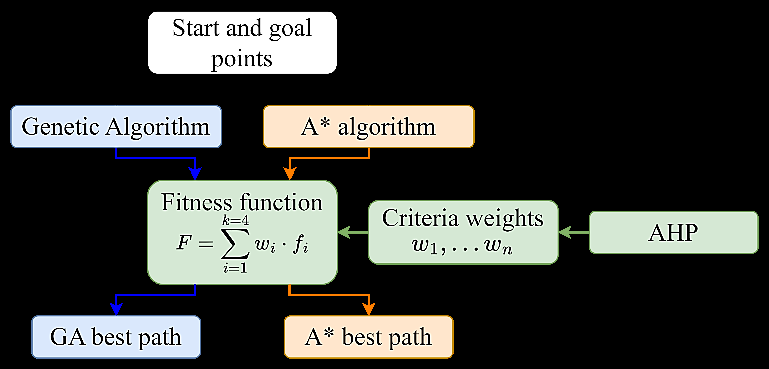
The study introduces a novel approach to path planning that considers multiple factors impacting the performance of continuum robots. By integrating the Analytical Hierarchy Process (AHP) decision-making model with two well-known path planning algorithms, the research aims to improve the resilience of robotic movements. The parameters for evaluation include path distance, damage to motors and mechanical components, and the accuracy of the robot's tip during execution.
Experimentation and Findings
The researchers executed extensive experiments using two distinct simulated environments to test their approach. They applied modified Genetic and A* algorithms, allowing for diverse path generation while maintaining a focus on the defined criteria. Key findings indicate that the Genetic algorithm excels in generating a wider variety of paths, enhancing the robotic system's resilience as it can adapt by choosing less damaging routes based on current conditions.
Implications for Future Robotics
The implications of successfully enhancing the resilience of continuum robots are profound. As robotic systems increasingly operate in unpredictable environments—such as in medical procedures or intricate manual labor tasks—incorporating advanced decision-making capabilities enables these machines to better serve their roles with minimal human intervention.
The paper concludes that while both the Genetic and A* algorithms present viable path planning solutions, the Genetic algorithm's performance in creating diverse pathways significantly contributes to the overall resilience of continuum robots. This research sets a foundation for future studies aimed at refining robotic autonomy and operational efficiency in complex situations.
As industries evolve and the demand for autonomous systems rises, these advancements in continuum robot motion planning can catalyze new applications. By improving how robots navigate and adapt, we pave the way for a future where machines contribute more effectively alongside humans in diverse and challenging landscapes.
Authors: Oxana Shamilyan, Ievgen Kabin, Zoya Dyka, Oleksandr Sudakov, Peter Langendoerfer





