Breaking Barriers in Robot Interaction: UniTac's Game-Changing Approach to Touch Sensing Without Tactile Sensors
In an era where robots are becoming increasingly integrated into daily life, enhancing their ability to interact meaningfully with humans through touch is paramount. A new research paper from Brown University introduces UniTac, a groundbreaking method that enables whole-robot touch sensing without the need for additional tactile sensors. This approach leverages existing joint sensors to allow robots to localize contacts accurately, paving the way for more humane and intuitive interactions.
The Touch of Innovation: What Is UniTac?
UniTac is a data-driven model that transforms how robots perceive touch, relying solely on proprioceptive sensors—those that measure the position and torque of robot joints. Unlike traditional methods requiring cumbersome tactile sensors, UniTac democratizes touch sensing, providing an easy-to-implement solution for robotic platforms like the Franka robot arm and Boston Dynamics’ Spot quadruped. The method achieves contact localization within an average error of 7.2 cm at a remarkable 2000 Hz, demonstrating robustness and versatility.
Why Touch Sensing Matters
Despite advancements in robotics, the lack of touch sensitivity hinders robots from establishing nuanced interactions with humans. Touch is integral in communication, facilitating trust and emotional connections. For example, a pat or a light touch can convey complex social cues, a capability robots have struggled to emulate effectively. UniTac aims to address this shortcoming, enabling robots to respond to physical contact in real-time, thereby enhancing their social interaction capabilities.
How Does It Work?
The core innovation of UniTac lies in its use of proprioceptive data to infer contact locations on a robot's surface. The researchers conduct experiments where various surfaces of the robots are touched, collecting joint torque and position data. A neural network model then processes this information to predict contact points accurately. The method diverges from traditional model-based approaches by eliminating the need for extensive simulations or recalibrations, which can be a barrier to practical implementation.
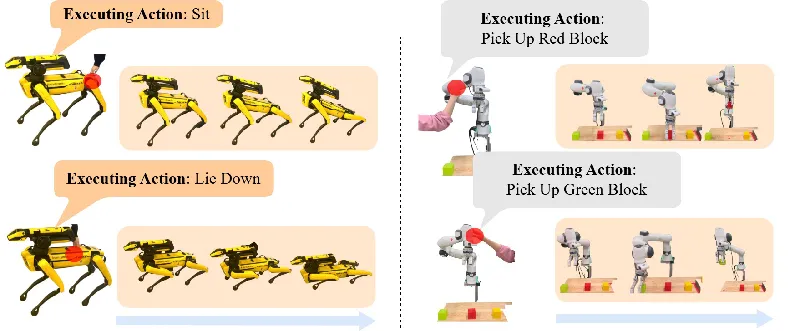
Real-World Applications
The implications of UniTac extend far beyond mere localization of contact. In practical applications, the system can integrate touch-based responses into robots. For instance, the Spot robot can be programmed to execute complex movements or postures based on human touch, mimicking behaviors observed in animals during interaction. Moreover, the Franka robotic arm can utilize virtual buttons for executing tasks, enhancing functionality without physical interfaces.
Setting the Stage for Future Interactions
UniTac not only presents a technical achievement but also opens new research avenues in physical human-robot interaction (pHRI). As robots become more adept at understanding and responding to touch, we move closer to a future where robots can interact with us in a manner akin to social animals, enriching our interactions with technology. The research team's vision includes scaling up data collection for supporting more complex touch interactions, suggesting a promising trajectory for advancements in robotic touch sensing.
In summary, UniTac represents a pivotal development in making robots more relatable and intuitive companions. As the lines between human and robot interactions blur, innovations like UniTac position the field of robotics for transformative changes in how we engage with machines.

